
Modular Reinforcement Learning for a Quadrotor UAV
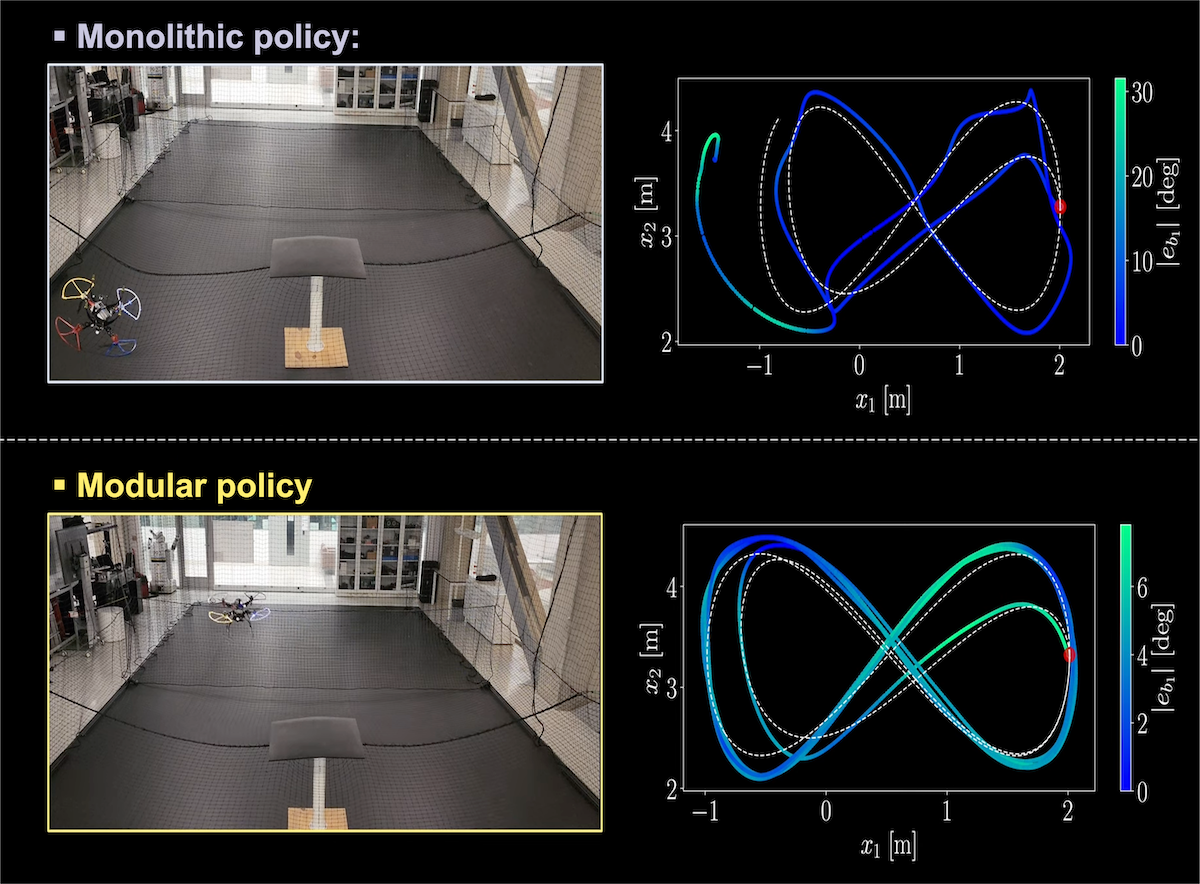
This study addresses the limitations of traditional RL approaches for quadrotor control by decomposing the quadrotor dynamics into translational and yaw subsystems, resulting in more efficient training and enhanced yaw control performance.