\(
\newcommand{\blah}{blah-blah-blah}
\newcommand{\eqb}[1]{\begin{eqnarray*}#1\end{eqnarray*}}
\newcommand{\eqbn}[1]{\begin{eqnarray}#1\end{eqnarray}}
\newcommand{\bb}[1]{\mathbf{#1}}
\newcommand{\mat}[1]{\begin{bmatrix}#1\end{bmatrix}}
\newcommand{\nchoose}[2]{\left(\begin{array}{c} #1 \\ #2 \end{array}\right)}
\newcommand{\defn}{\stackrel{\vartriangle}{=}}
\newcommand{\rvectwo}[2]{\left(\begin{array}{c} #1 \\ #2 \end{array}\right)}
\newcommand{\rvecthree}[3]{\left(\begin{array}{r} #1 \\ #2\\ #3\end{array}\right)}
\newcommand{\rvecdots}[3]{\left(\begin{array}{r} #1 \\ #2\\ \vdots\\ #3\end{array}\right)}
\newcommand{\vectwo}[2]{\left[\begin{array}{r} #1\\#2\end{array}\right]}
\newcommand{\vecthree}[3]{\left[\begin{array}{r} #1 \\ #2\\ #3\end{array}\right]}
\newcommand{\vecdots}[3]{\left[\begin{array}{r} #1 \\ #2\\ \vdots\\ #3\end{array}\right]}
\newcommand{\eql}{\;\; = \;\;}
\newcommand{\eqt}{& \;\; = \;\;&}
\newcommand{\dv}[2]{\frac{#1}{#2}}
\newcommand{\half}{\frac{1}{2}}
\newcommand{\mmod}{\!\!\! \mod}
\newcommand{\ops}{\;\; #1 \;\;}
\newcommand{\implies}{\Rightarrow\;\;\;\;\;\;\;\;\;\;\;\;}
\newcommand{\prob}[1]{\mbox{Pr}\left[ #1 \right]}
\newcommand{\expt}[1]{\mbox{E}\left[ #1 \right]}
\newcommand{\probm}[1]{\mbox{Pr}\left[ \mbox{#1} \right]}
\newcommand{\simm}[1]{\sim\mbox{#1}}
\definecolor{dkblue}{RGB}{0,0,120}
\definecolor{dkred}{RGB}{120,0,0}
\definecolor{dkgreen}{RGB}{0,120,0}
\)
Module 11: Machine Learning
11.1 What is machine learning?
The "machine" part is easy to understand: algorithms.
What about the "learning" part?
- Broadly, one could say: we're interested in software that
improves "performance" over time.
- Consider a gradient-descent optimization algorithm: is it learning?
- In some senses, yes, because it's learning something about
the function as it drives towards the optimum.
- But one could say that its "job" is to find the optimum
\(\Rightarrow\) Its ability to do so does NOT improve with successive
trials or with new functions.
\(\Rightarrow\) We don't consider this learning.
- An optimization algorithm that performs better and better as
it encounters more functions?
\(\Rightarrow\) Yes, we would say some "learning" is going on.
- At the very least, it looks like a learning algorithm
will need to store "experience" in some way.
- We will focus on a particular kind of machine learning problem
\(\Rightarrow\) The classification problem
- Before that, let's look at some motivating examples.
Exercise 1:
Can you find an example of an application on the web that learns?
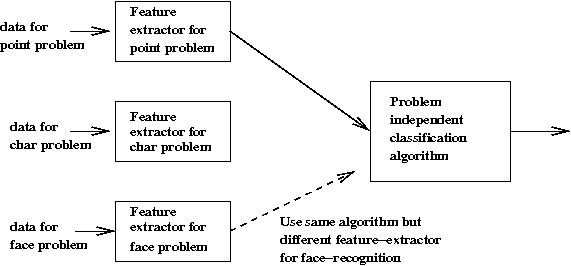
Meet our example (classification) applications:
- All of the data will lie in two classes (for simplicity of
presentation).
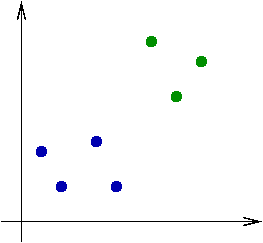
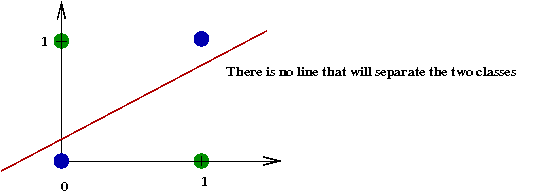
- Classifying 2D points:
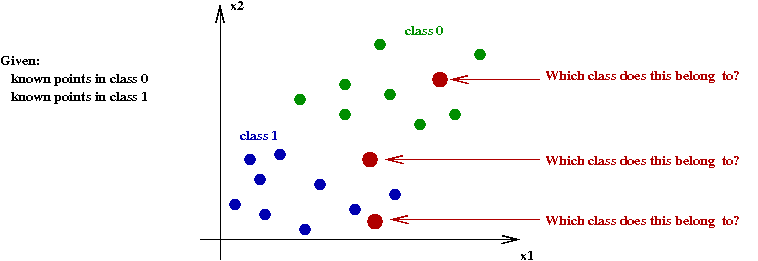
- We're given some already-classified data (blue, green points).
- The data here are in two classes (categories, groups, whatever).
- For a new point, we need to decide which class the
point belongs to.
- Classifying handwritten characters:
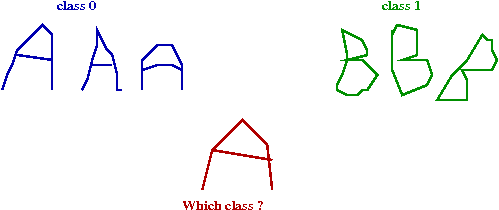
- The input: samples of already-classified data (chars from
each of the classes).
- For a newly-written char, which class does it match?
- Face recognition:
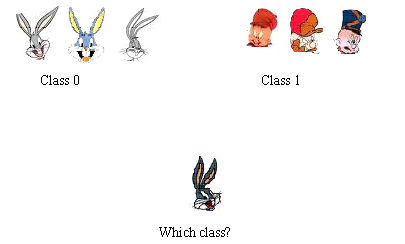
- The input: a set of training images for each class.
- For a new image, which class does it belong to?
Exercise 2:
Download and unpack
classifier.jar. Then inside
the classifierJar directory, execute ClassifierGUI.
- In the Point-problem, generate some points to see where the two
classes fall. Why is the split-uniform data set harder (from
a machine-learning viewpoint) than the uniform one?
- In the Char-problem, click on "load" to load samples of "A" and
"B" renderings.
- In the Face-problem, click on "load" and browse variety of
face samples. Which person shows more variety in images?
Let's try and frame the classification problem more carefully:
Exercise 3:
For the point problem:
- Create 10 training points from one of the distributions.
- Compile and upload the NullClassifier and click the "train" button.
Next, examine the code in NullClassifier. How does the
screen output correspond to the generated data?
Exercise 4:
Consider the char problem:
- How would the data for a single char be represented as
as an \(d\)-dimensional point?
- Examine the code in CharProblem.java and
identify the manner by which the samples are constructed from line-segments.
Where in the code is this being done?
- Find a place in the code to print out the dimension \(d\)
for each test sample (which you create on the right side).
What is a typical value of \(d\)? What kind of character data will
have large \(d\)?
Exercise 5:
Similarly, what is the size of \(d\) for the face problem?
Add code to FaceProblem.java to
print out these sizes. Is \(d\) the same for all samples?
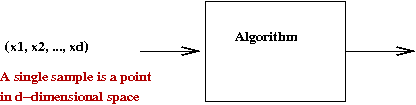
More notation:
- We've seen that the dimension \(d\) can be quite large in a
data set.
- Each sample is a point in d-dimensional space
\(\Rightarrow\) \((x_1,x_2, ..., x_d)\)
- Here, each \(x_i\) is a real number
\(\Rightarrow\) the coordinate in dimension \(i\).
- We will use the shorthand
\(x = (x_1,x_2, ..., x_d)\).
- Note: in some problems, every sample may not have the
same dimension
\(\Rightarrow\) We have to be prepared to work with different dimensional samples.
Exercise 6:
Which of the three applications we've seen has this problem?
\(\Rightarrow\) In this case, we may want to pre-process the data to make all
samples have the same dimension.
- Assume we are given \(M\) training samples.
- We'll use the notation \(x^{(m)}\) to denote the
\(m\)-th sample.
- Thus, \(x_i^{(m)}\) denotes the
\(i\)-th component of the \(m\)-th sample.
- Let \(C\) = the number of classes: class 0, class 1,
... , class C-1.
- Mostly, we'll consider the two-class problem, \(c=0\) or
\(c=1\).
- Now each sample in the training data is labelled.
\(\Rightarrow\) The algorithm is told which class the sample belongs to.
- Let \(y^{(m)}\) denote the label for sample \(m\).
\(\Rightarrow\) Thus, in the two class problem,
\(y^{(m)}=0\) or \(y^{(m)}=1\)
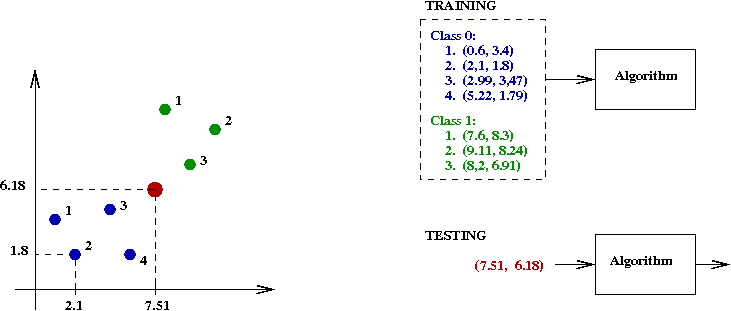
Exercise 7:
For the point example (see the picture above) with \(M=7\):
- What is \(x^{(3)}\)?
- What is \(x_1^{(3)}\)?
- What is \(y^{(3)}\)?
- Thus, more formally, the training input to a problem is
a collection of sample-label combinations:
\(x^{(1)}\), \(y^{(1)}\)
\(x^{(2)}\), \(y^{(2)}\)
\(x^{(3)}\), \(y^{(3)}\)
...
\(x^{(m)}\), \(y^{(m)}\)
where each \(x^{(m)}\) is a sample and
\(y^{(m)}\) is the class the sample belongs to.
- We will sometimes use the shorthand \(y(x)\) to denote
the true class (label) that \(x\) belongs to.
\(\Rightarrow\) \(y^{(m)} = y(x^{(m)})\)
- Similarly, for testing data:
- We'll use \(L\) to denote the number of test samples.
- In this case, the labels are not given to the algorithm.
\(\Rightarrow\) The algorithm is expected to provide the label.
- Thus the test data will be \(d\)-dimensional samples:
\(v^{(1)}, v^{(2)}, ..., v^{(L)}\)
- In reality, there may be some "true answer" which may be
known to the tester.
- As before, we'll use the notation \(y(v)\)
to denote the true (unknown) class for sample \(v\).
- Let \(A\) denote an algorithm.
- During testing, \(A(v^{(k)})\) denotes the response
to the \(k\)-th test.
- Thus, ideally, \(A(v^{(k)}) = y(v^{(k)})\).
\(\Rightarrow\) Otherwise, the algorithm makes a mistake.
- A minor programming issue:
- Most of our notation is mathematical: e.g,
\((x_1,x_2, ..., x_d)\).
\(\Rightarrow\) indexing starts with \(1\).
- However, in our code, we'll start with \(0\).
- Thus, we'll occasionally switch to
\((x_0,x_2, ..., x_{d-1})\)
where appropriate.
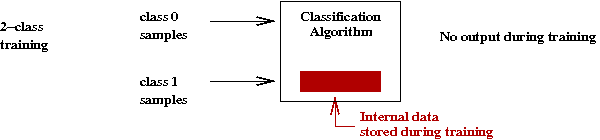
11.2 A simple learning algorithm: don't
We were only partly facetious:
- The idea is this:
- During training: merely store the training samples
(i.e., don't learn).
- During testing, use the stored data to try
and classify test samples.
- Thus, the training algorithm is trivial:
Algorithm: nearestNeighborTraining (x(m), y(m))
Input: M training samples x(m), with labels y(m)
1. Store x(m), y(m)
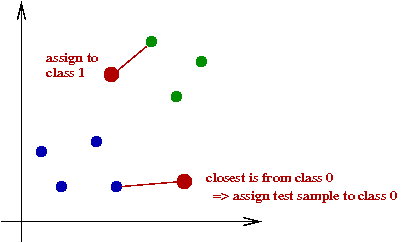
- How to classify a test sample?
\(\Rightarrow\) A simple idea: find the closest training sample and
assign the class of that training sample.
- In pseudocode:
Algorithm: nearestNeighborTest (v)
Input: test sample v
1. best = 1
2. leastDistance = distance(x(1),v)
3. for m=2 to M
4. if distance(x(m),v) < leastDistance
5. leastDistance = distance(x(m),v)
6. best = m
7. endif
8. endfor
// Return the class that training sample x(best) belongs to.
9. return y(x(best))
Exercise 8:
Download (into the classifierJar directory) and
modify NearestNeighbor.java
to implement the Nearest-Neighbor algorithm.
- Try it on the point problem for various numbers of
generated points, and for different distributions.
- Can you create a test point that makes it fail?
- Apply the algorithm to the char problem. Why doesn't
it work?
Improvements to Nearest-Neighbor:
- Notice that a little noise in the data can easily result
in poor classification:
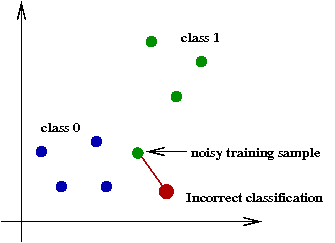
- A noisy sample near the boundary between two classes
can wrongly favor the class of the noisy point.
- The noisy point stays in the training data
\(\Rightarrow\) The algorithm does not evaluate data quality.
- K-Nearest-Neighbor:
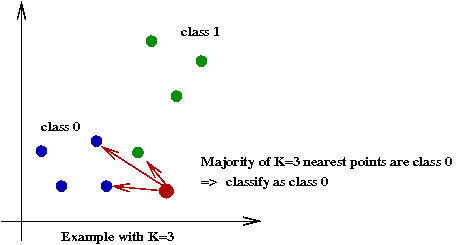
- Instead of relying on one point, try \(K\)
\(\Rightarrow\) Find the \(K\) nearest points and pick the class most represented.
- Thus, the \(K\) nearest points "vote" on the class to be assigned.
Exercise 9:
What is the running time of K-Nearest-Neighbor in terms of
\(M\), the number of training samples, and \(K\)?
Does \(d\) matter in the running time? What data
structure is most appropriate for this computation?
Exercise 10:
Consider a database of \(10^6\) greyscale images
each of size 0.1 megabytes. For \(K=10\), what is the
number of arithmetic operations (say, multiplications) for
a single classification? How would you calculate the distance
between two images?
- Thus, large data sets can slow down classification.
- This is particularly important when rapid classification is
needed
\(\Rightarrow\) e.g., real-time applications such as handwriting recognition.
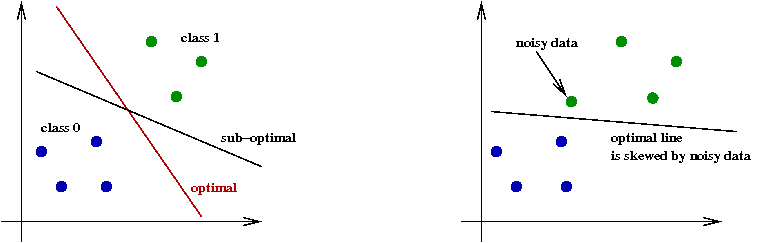
- Second idea: pre-process the data to store fewer, but "representative" points:
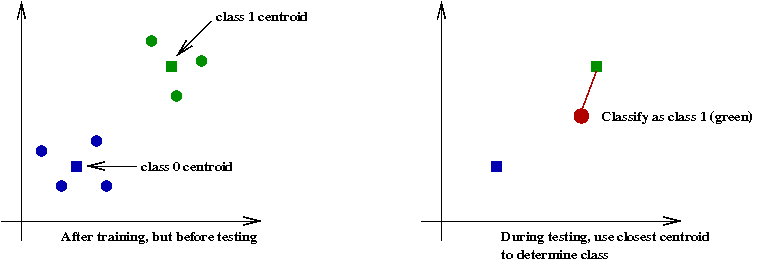
- In the most extreme version: store only the centroids of each class.
- However, the centroids can be skewed by noisy data.
- A variation: store a more representative sample.
- Note: the idea of "condensing" the data into representative points is, in some sense, "learning"
Algorithm: nearestNeighborTraining (x(m), y(m))
Input: M training samples x(m), with labels y(m)
1. Preprocess into representative samples x'(m), y'(m)
2. Store x'(m), y'(m)
- Third idea: use weighted distances:
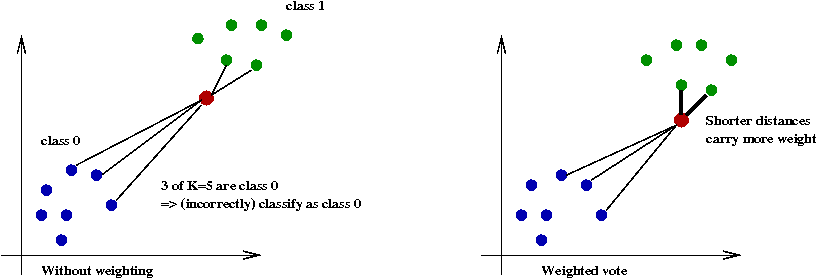
- Key idea: use the actual distance to the \(K\) nearest neighbors.
- Let each neighbor's vote depend on this actual distance.
- Fourth idea: use smarter data structures:
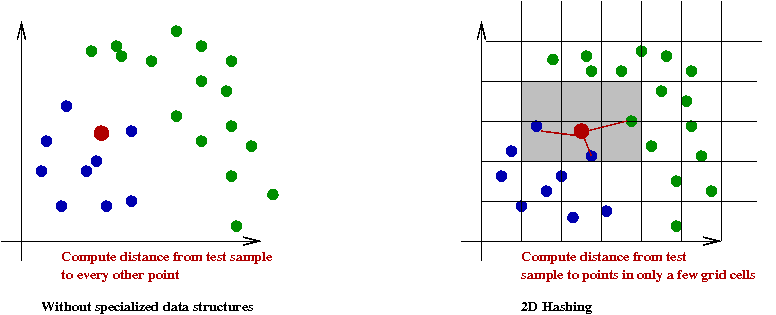
- Instead of performing distance calculations to each point
\(\Rightarrow\) Sharply reduce the number of distance calculations using a clever data structure.
- Example data structures: 2D hashtable, quadtrees, kd-trees.
- See Module 4 in CS-3212 for an explanation of 2D hashing.
Exercise 11:
Download, compile and execute
SimpleNN.java.
You will also need
DataGenerator.java.
- Examine SimpleNN to confirm that it implements
the Nearest-Neighbor algorithm for samples that come out
of DataGenerator.
- What is the probability of error?
- Change the < to <= in the if
condition at the end of classify(). What is the
probability of error?
- Explain why there's such a big difference.
11.3 A probabilistic viewpoint
Consider an example from the point problem:
Before getting into the details, let's recall Bayes' rule:
- In the "event" way of thinking, for any two events \(A\) and \(B\),
$$
\prob{A | B} \eql \frac{\prob{B | A} \prob{A}}{\prob{B}}
$$
- In terms of rv's, for any two (discrete) rv's \(X\) and \(Y\),
$$
\prob{X=k | Y=m} \eql \frac{\prob{Y=m | X=k}
\prob{X=k}}{\prob{Y=m}}
$$
- Recall: it doesn't really matter whether one event "came
before" (in the sense of causality or time).
To simplify, we'll look at a discrete 1D example:
- In this example, the data is taken from the set:
\(\{0,1,2,3,4,5\}\).
- There are two classes: \(c=0\) and \(c=1\).
Exercise 12:
Download DataExample.java
and execute. You will also need
DataGenerator.java
and
RandTool.java.
Write code to estimate the probability that data is generated
from class 0. What is the probability that the data comes
from class 1?
- Next, let's define some notation we'll need:
- Let rv \(X\) denote the value (from \(\{0,1,2,3,4,5\}\))
produced in any one particular trial.
- Let rv \(C\) denote the class.
- Note: you have just estimated \(\prob{C=0}\) above.
Exercise 13:
Add code to estimate \(\prob{X=3 | C=0}\) and
\(\prob{X=3 | C=1}\).
- Why is it that the sum of these two does not equal 1? Which
equation does result in 1?
- If you were given a test sample \(x=3\) which of the
two classes would you think it likely came from?
- An examination of DataGenerator tells us how
the data is generated:
- First, the generator chooses which class to generate from.
- Then, if class 0 is chosen, the output is generated
according to some probabilities (in method generate0()).
- Likewise, if class 1 is chosen, the output is generated
according to different probabilities (in generate1()).
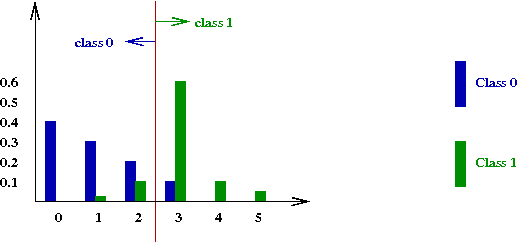
- We can write each of these down for class \(0\):
\(\prob{X=0 | C=0} = 0.4\).
\(\prob{X=1 | C=0} = 0.3\).
\(\prob{X=2 | C=0} = 0.2\).
\(\prob{X=3 | C=0} = 0.1\).
\(\prob{X=4 | C=0} = 0\).
\(\prob{X=5 | C=0} = 0\).
Exercise 14:
Write down the conditional pmf \(\prob{X=m | C=1}\) by examining
the code in DataGenerator.
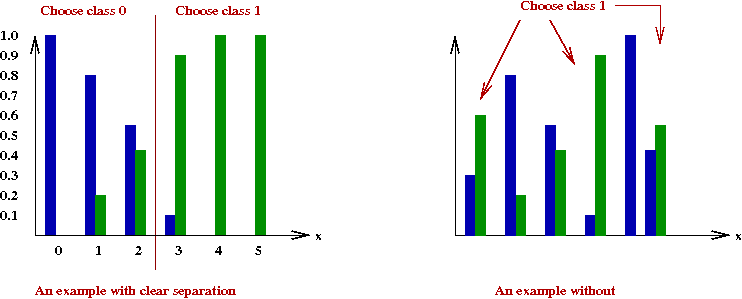
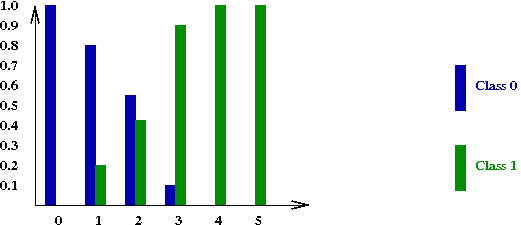
- Now consider two classification questions:
- If the data happens to be \(x=0\), which class did it
likely come from?
\(\Rightarrow\) This is easy: it could only be class 0.
- If the data happens to be \(x=3\), which class did it
likely come from?
- Let's try this idea:
Given sample \(x\), if \(\prob{X=x|C=0} \gt \prob{X=x|C=1}\),
classify \(x\) as class \(0\), else classify as class \(1\).
Pictorially,
- To evaluate this algorithm, we need a metric.
Let \(\prob{E} = \) probability that the algorithm makes a mistake.
Exercise 15:
Implement the algorithm in DataExample2.java,
which has the code for evaluation. Try a different algorithm to
see if the error improves.
- Now let's consider an important point:
- We will limit our error to only those samples where \(x=3\).
- Define \(\prob{E_3} = \) probability that the
algorithm makes a mistake when \(x=3\).
Exercise 16:
Copy the algorithm over to DataExample3.java,
which estimates the error when \(x=3\).
- What is the error?
- Next, change \(\prob{C=0}\) (which is now 0.4) to 0.9. What is
the error now?
- How would you change the algorithm to improve the error?
- What we have seen is that the rule
If \(\prob{X=x|C=0} \gt \prob{X=x|C=1}\), classify as
class \(0\), else classify as class \(1\).
doesn't necessarily work.
- Instead, consider the following rule:
Given \(x\), if \(\prob{C=0|X=x} \gt \prob{C=1|X=x}\), classify as
class \(0\), else classify as class \(1\).
- Unfortunately, we don't know \(\prob{C=c|X=x}\).
\(\Rightarrow\) We'll use Bayes' rule for this:
$$
\prob{C=c|X=x} \eql \frac{\prob{X=x|C=c}
\prob{C=c}}{\prob{X=x}}
$$
Pictorially,
- Thus, this new rule can be written as:
Given \(x\), classify as class \(0\) if
$$
\frac{\prob{X=x|C=0} \prob{C=0}}{\prob{X=x}}
\; \gt \;
\frac{\prob{X=x|C=1} \prob{C=1}}{\prob{X=x}}
$$
- Since \(\prob{X=x}\) cancels on both sides, the rule is:
Given \(x\), classify as class \(0\) if
$$
\prob{X=x|C=0} \prob{C=0}
\; \gt \;
\prob{X=x|C=1} \prob{C=1}
$$
\(\Rightarrow\) This is called the Bayes' classification rule.
Exercise 17:
For the case \(x=3\), compute \(\prob{X=x|C=0} \prob{C=0}\)
and \(\prob{X=x|C=1} \prob{C=1}\) by hand when \(\prob{C=0}=0.4\).
Then, compute both when \(\prob{C=0}=0.9\).
Optimality of Bayes' classification rule:
The same idea applies to continuous distributions:
- Suppose rv \(X\) is continuous.
- Let \(f_0(x|C=0)\) be the conditional pdf of \(X\)
given the data comes from class \(0\).
- Similarly, let \(f_1(x|C=1)\) be the conditional pdf of \(X\)
given the data comes from class \(1\).
- Then, the Bayes' classification algorithm is:
Given \(x\), classify as class \(0\) if
$$
f_0(x|C=0) \prob{C=0}
\; \gt \;
f_1(x|C=1) \prob{C=1}
$$
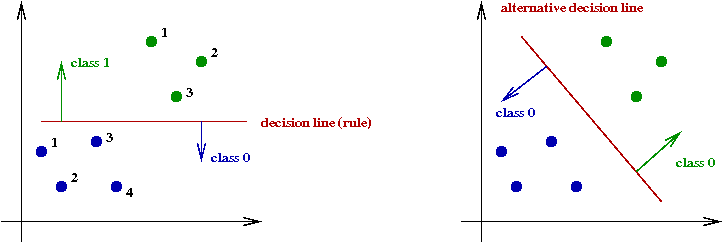
Let's now return to the idea of a separating line:
- In 1D, since there is no line, we could call it a separating point:
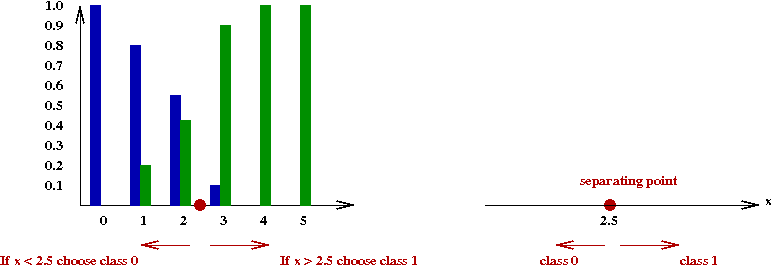
Here, there is some point \(x_0\) such that our rule becomes:
Given \(x\), choose class \(0\) if \(x \lt x_0\).
- In 2D, this becomes a separating line:
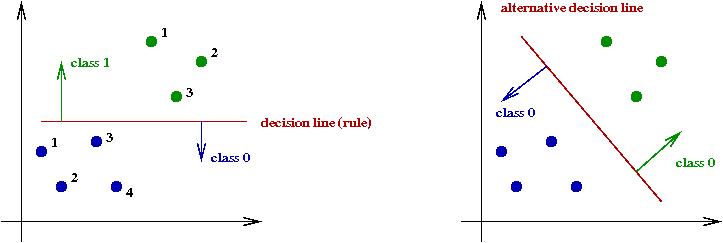
How should our rule be written?
- Notice that our data points are now of the form:
\(x = (x_1, x_2)\).
- The equation of a line in 2D can be written in the form:
\(g(x) = 0\) where
\(g(x) = g(x_1,x_2) = w_1x_1 + w_2x_2
+ w_3\).
- In \(d\) dimensions, we call this a separating hyperplane.
- Here, data points are of the form:
\(x = (x_1,x_2, ..., x_n)\).
- Fortunately, the equation for a hyperplane generalizes naturally
from a 2D line:
\(g(x) = 0\) where
\(g(x) = g(x_1,x_2, ...,x_n)
= w_1x_1 + w_2x_2
+ ... + w_nx_n + w_{n+1}\).
- Thus, the decision rule is this:
Given \(x\), choose class \(0\)
if \(g(x) \lt 0\). (Choose class \(1\) otherwise).
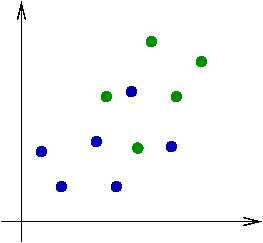
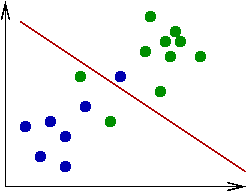
- Does a separating line work for every problem?
Exercise 18:
Give an example (with distributions) where it does not work.
A rationale for using separating hyperplanes:
- Note that even if the given data is not separable, we could
still use a line and allow for occasional errors:
- Let's consider the 2D case when the conditional pdfs
\(f_c(x|C=c)\) are (2D) Gaussian.
In particular, when they are independent and have the same distribution.
- What is a 2D Gaussian distribution?
- Here, each point is a rv \((X_1, X_2)\).
- Each \(X_i\) is a Gaussian rv.
- Generating points from such a distribution results in a
"cloud" of points.
- One can show
that the Bayes' rule is equivalent to a separating line
when the variances are the same.
- Unfortunately, if the variances are different, it turns out
that the optimal separating curve is not a line.
\(\Rightarrow\) Still, a line is a reasonable approximation if the variances
are comparable.
What have we learned so far? Two important ideas:
- Idea 1: There is some underlying distribution from which the
data is drawn
\(\Rightarrow\) We might need to study this distribution for more insight.
- Idea 2: Using a separating hyperplane makes sense in many
cases, and has a theoretical (Gaussian) foundation.
11.4 The best hyperplane
Let's now look at the problem of finding the best hyperplane for
a given training set:
- We will ignore the underlying distribution:
- Even without knowledge of the distribution, one could
discard outliers.
- Knowledge of the distribution can help weight points, or
discard others.
- To gain knowledge about the distribution
\(\Rightarrow\) Estimation problem.
- Nonetheless, we'll proceed with finding the best hyperplane
assuming the training points are representative.
- We will need some notation:
- We'll consider 2D first, for simplicity.
- Let \(w_1x_1 + w_2x_2
+ w_3 = 0\) be the equation of the line.
- For any point \((x_1,x_2)\),
Let \(A((x_1,x_2)\) denote the output
of the algorithm.
- What does "best" mean? First, let's understand how a "hyperplane"
based algorithm works:
- The basic idea is simple:
if w1x1 + w2x2 + w3 < 0
classify as class 0
else
classify as class 1
endif
- Note: we could flip the classes around (in the if-statement).
\(\Rightarrow\) It would only result in different constants (negating the constants).
- Note: the "variables" to be optimized are:
\(w_1, w_2\) and \(w_3\)
\(\Rightarrow\) They define the line.
- Now, if we've found a line, let's ask how the algorithm
performs against the training data:
- Consider a training point
\((x_1^{(m)},x_2^{(m)})\) and
its true class \(y^{(m)}\).
- Let \(\epsilon^{(m)} =
(y^{(m)} -
A(x_1^{(m)},x_2^{(m)}))^2\)
be the error, the difference between true class and A's output.
- Then the total error over all training samples \(m\) is:
$$
E \eql \sum_m \epsilon^{(m)}
$$
- Observe that \(E\) is a function of
\(w_1, w_2, w_3\) because
each \(\epsilon^{(m)}\) depends on these \(w_i\)'s.
- Thus, to minimize \(E\), one can evaluate \(E\) over various
choices of the \(w_i\)'s.
- Unfortunately, this is impractical for two reasons:
- For realistic problems, the dimension is too large
\(\Rightarrow\) Something like bracket-search would collapse when
\(d=100\) (char example).
- \(E\) is not a differentiable function of the \(w_i\)'s.
Exercise 19:
Why isn't \(E\) differentiable with respect to \(w_i\)?
Instead we will opt for a simple approximation:
- Consider a point \((x_1,x_2)\).
- If \(y(x_1,x_2) = 1\), but
\(A(x_1,x_2) = 0\), the algorithm makes
an error.
- Notice that \(w_1x_1 +
w_2x_2 + w_3 \lt 0\) in this case.
- Thus, a better choice of \(w_i\)'s will result
in \(w_1x_1 +
w_2x_2 + w_3 \gt 0\).
- This choice will lessen the distance
$$
y(x_1,x_2) \; - \; w_1x_1 - w_2x_2 - w_3
$$
- A symmetrically equivalent reasoning applies to the case
when If \(y(x_1,x_2) = 0\), but \(A(x_1,x_2) = 1\),
- Here, once again, we want to lower the distance between
\(w_1x_1 - w_2x_2 - w_3\) and \(y(x_1,x_2)\).
- Now, for any training sample,
\((x_1^{(m)},x_2^{(m)})\) let
$$
\epsilon^{(m)} \eql (y^{(m)} - w_1x_1^{(m)} - w_2x_2^{(m)} - w_3)^2
$$
Note: \(\epsilon^{(m)}\) is a function of the
\(w_i\)'s.
- The intuition: minimizing the squared error should lower the
"distance" we seek to minimize when the algorithm is "wrong".
- For brevity, define
$$
S^{(m)} \eql w_1x_1^{(m)} + w_2x_2^{(m)} + w_3
$$
Then,
$$
\epsilon^{(m)} \eql (y^{(m)} - S^{(m)})
$$
- Define the approximate error
$$
E(w_1,w_2,w_3) \eql
\sum_m \epsilon^{(m)}
$$
Note: \(E\) is a function of the \(w_i\)'s.
- In fact, even better,
\(E\) is a differentiable function of the \(w_i\)'s.
Exercise 20:
Why?
Let's use gradient descent:
- First, since is a multivariable problem, we will need to
compute partial derivatives.
- Let
$$\eqb{
\epsilon_i^{(m)}
\eqt
\frac{\partial \epsilon^{(m)}}{\partial w_i}
\eqt
\mbox{partial derivative of \(\epsilon^{(m)}\) with respect to \(w_i\)}
}$$
- Since
$$
\epsilon^{(m)} \eql
( y^{(m)} - w_1x_1^{(m)} - w_2x_2^{(m)} - w_3 )^2
$$
the partial derivative with respect to \(w_i\) is
$$\eqb{
\epsilon_i^{(m)}
\eqt
\frac{\partial}{\partial w_i} (y^{(m)} - w_1x_1^{(m)} - w_2x_2^{(m)}- w_3 )^2 \\
\eqt
- 2 (y^{(m)} - w_1x_1^{(m)} - w_2x_2^{(m)} - w_3) x_i\\
\eqt
- 2 (y^{(m)} - S^{(m)}) x_i
}$$
- Next, let \(E_i'\) denote the partial derivative
of \(E\) with respect to \(w_i\). Then,
$$\eqb{
E_i'
\eqt
\frac{\partial}{\partial w_i} \sum_m \epsilon^{(m)}\\
\eqt
\sum_m \epsilon_i^{(m)}
}$$
- For gradient descent, we need \(E_i'\) to update each \(w_i\).
- Then, gradient descent can be applied to each variable:
Algorithm: computeOptimalWeights (x(m), y(m))
Input: M training samples x(m), y(m)
1. Initialize wi's. // Most often: to some small non-zero values.
2. while not converged
3. for each i
4. Ei' = 0
5. for each m
6. compute partial derivative εi(m)
7. Ei'= Ei' + εi(m)
8. endfor
9. endfor
10. for each i
11. wi = wi - α Ei'
12. endfor
13. endwhile
14. return wi's.
We're now in a position to describe both training and testing for
this approach:
- Training:
Algorithm: gradientTraining (x(m), y(m))
Input: M training samples x(m), y(m)
1. computeOptimalWeights (x(m), y(m))
2. store weights
- Testing:
Algorithm: gradientClassification (x)
Input: test sample x = (x1, ..., xd)
1. S = w1x1 + ... + wdxd + wd+1
2. if S < 0
3. return 0 // Classify as class 0
4. else
5. return 1 // Classify as class 1
6. endif
- Lastly, a small point about convention:
- It is sometimes convenient to use "-1 and 1" instead of "0 and 1"
for the two classes.
Exercise 21:
Download Gradient.java
into your classiferJar directory.
- Examine the code and verify that gradient descent (with line-search)
is being used.
- Use this algorithm as the classifier to classify 100 points in
the point problem.
- Add code to plot the separating line in a Function object.
- Reduce the number of iterations to 500. What is the result?
- How does the algorithm perform without line-search?
A further approximation:
- Notice that we sum over all samples \(m\) in computing
the partial derivative \(E_i'\).
- This approach has two disadvantages:
- If \(m\) is large, it's a large calculation.
- It cannot be used for incremental training
\(\Rightarrow\) when you want to intersperse testing with training.
Exercise 22:
In what application would we want to intersperse testing with training?
- Suppose we want to update the weights \(w_i\)
after each training sample.
- As an approximation, we could leave out the other \(m\)'s
while not converged
for each m
compute partial derivative εi(m)
for each i
wi = wi - α Ei'
endfor
endfor
// Note: the weights may be used here for testing.
endwhile
This approximation is called the Widrow-Hoff rule, or sometimes,
the Delta-rule.
A few more comments:
- The \(w_i\)'s are often called weights.
- Given a test sample, the algorithm checks whether
\(w_1x_1 +
w_2x_2 + w_3 \gt 0\),
\(\Rightarrow\) Equivalent to seeing whether
\(w_1x_1 +
w_2x_2 \gt - w_3\),
- This is of the form
Check whether weighted sum of \(x_i\)'s is
greater than a threshold (that happens to be \(-w_3\)).
- Thus, we sometimes refer to the training as "training the weights".
- The \(w_i\)'s are algorithm parameters.
11.5 Minimizing an alternative error function: the perceptron
The perceptron is a
simple and historically pivotal algorithm:
- The perceptron is only slightly different than the Delta rule,
as we'll see, but simpler.
- First, for a given set of weights and given input, a perceptron
applies the same weighted-sum as before:
Algorithm: applyPerceptron (x)
Input: a sample x
// Apply the current weights and check against threshold.
1. S = w1x1 + ... + wdxd + wd+1
2. if S > 0
3. return 1
4. else
5. return 0
6. endif
- Training:
Algorithm: perceptronTraining (x(m), y(m))
Input: M training samples x(m), y(m)
1. Initialize wi's. // Most often: to some small non-zero values.
2. while not converged
3. for each m
4. z(m) = applyPerceptron (x(m))
5. for each i
6. wi = wi + α (y(m) - z(m)) xi(m)
7. endfor
8. endfor
9. endwhile
10. return wi's.
- Testing: this is the same as applying the perceptron.
- Intuition:
- Consider a sample where \(y^{(m)} = 1\), but
the predicted class is \(z^{(m)} = 0\).
- Then, the update
\(w_i = w_i + \alpha (y^{(m)} - z^{(m)}) x_i^{(m)}\)
has the effect of increasing the weights.
- This is exactly what we want because larger weights increase the
possibility that the weighted sum will exceed the threshold.
- Similarly, when the weighted sum is too large, we want to
decrease the weights.
The perceptron algorithm is really
gradient descent applied to a different objective function:
- Define the error \(E = \sum_m (y^{(m)} - z^{(m)})\).
\(\Rightarrow\) This is not the mean-squared error we used for the Delta rule.
- We will distinguish between the two cases when the
algorithm makes a mistake:
- Let M' = set of samples such that \(y^{(m)} = 1\) but
\(z^{(m)} = 0\)
- Let M'' = set of samples such that \(y^{(m)} = 0\) but
\(z^{(m)} = 1\)
- Accordingly, we will break the error into two parts:
- \(E' = \sum_{m\in _M'} (y^{(m)} - z^{(m)})\).
- \(E'' = \sum_{m\in M''} (y^{(m)} - z^{(m)})\).
- Then, notice that we want to minimize \(E'\) and maximize
\(E''\) (because of the sign).
- This is the same as minimizing \(E' - E''\).
- Next, observe that \(E\) is not differentiable with
respect to \(w_i\) (because \(z\) is a step-function).
- Once again, we'll approximate the error by using the
direct (un-stepped) difference
\(E = \sum_m (y^{(m)} - w_{d+1} - \sum_i w_i x_i) \)
- Similarly, we'll take \(E'\) and \(E''\) to represent
the un-thresholded difference.
- In this case, the derivative of \(E'\) with respect to \(w_i\)
is simply \(-x_i\) (the coefficient of \(w_ix_i\)).
- Likewise, the derivative of \(E''\) with respect to \(w_i\)
is \(x_i\).
- Thus, gradient descent would look like:
if m ε M'
wi = wi - α (- xi)
else
wi = wi - α (xi)
- But this is exactly what the algorithm does, by using
\((y^{(m)} - z^{(m)})\) as the sign.
More about perceptrons:
- One can show that if a training set is actually
linearly separable, there is a small enough stepsize
that'll get the perceptron to converge to an acceptable hyperplane.
- Two-input perceptrons can be used to emulate some logic: AND, OR,
NAND functions for example.
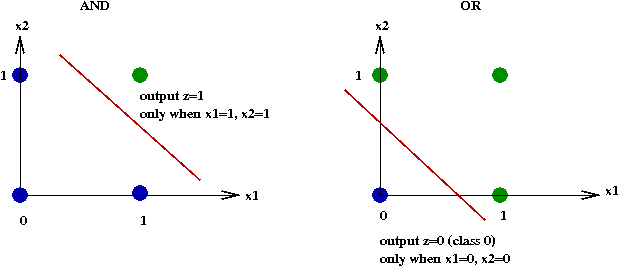
- However, perceptrons cannot handle data that is not linearly
separable, such as the XOR function:
11.6 Addressing the differentiability problem
Recall that the true error function was not differentiable:
- With the gradient algorithm or the Delta rule, we instead
differentiated an approximate error.
\(\Rightarrow\) By ignoring the step function
- Another approach: use a differentiable function.
- What we would like:
- Given input \(x = (x_1, ..., x_d)\),
and algorithm parameters \(w = (w_1, w_1,
... )\)
compute \(z = f(x, w)\).
- Then use \(z\) to decide which class.
- Ideally, we want \(f\) to be differentiable with respect
to \(w_i\).
- Ideally, we'd also like to use hyperplanes.
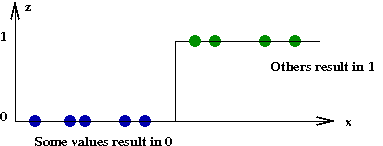
- Consider a single dimension \(d=1\):
- Earlier, we used the rule:
if z < 0
classify as class 0
else
classify as class 1.
endif
- Thus, the output values \(z\) are either 0 or 1 for any \(x\):
- Suppose instead we used the following:
z = f(x, w)
if z is closer to 0
classify as class 0
else
classify as class 1
endif
- Here, we will strive to make \(f\) a differentiable function.
- Ideally, we want a differentiable function that will be as
close to the "ideal" step function above, yet differentiable.
- One such popular function: the sigmoid function
$$
f(s) \eql \frac{1}{(1 + e^{-s})}
$$
Exercise 23:
Download and add code to Sigmoid.java
to compute and display the sigmoid function in the range [-10,10].
You will also need
Function.java and
SimplePlotPanel.java
How could you make it approximate a step function even more closely?
Exercise 24:
Show that the sigmoid derivative is
\(f'(s) = f(s) (1 - f(s))\).
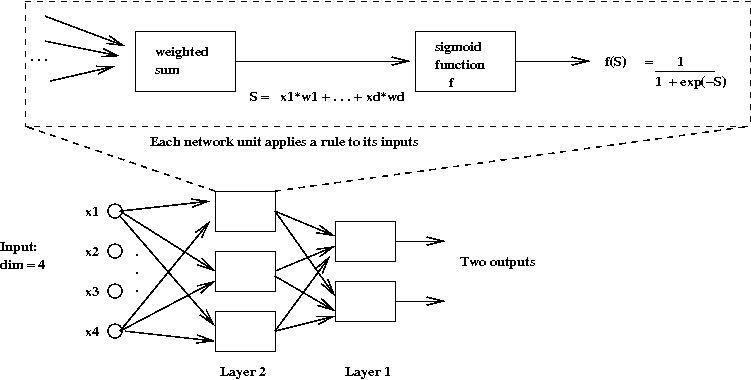
How is the sigmoid used?
- Define
\(S = w_1x_1 + ... + w_dx_d + w_{d+1}\)
to be the weighted sum (including threshold).
- To compute the output, simply compute \(f(S)\) and round.

- During training, use the derivatives:
$$\eqb{
\frac{\partial z}{\partial w_i} \eqt \frac{\partial f(S)}{\partial w_i}\\
\eqt f(S) (1 - f(S)) \frac{\partial S}{\partial w_i}
}$$
- We have already computed \(\frac{\partial S}{\partial w_i}\)
\(\Rightarrow\) This is what we used in the gradient algorithm.
11.7 Neural networks
Recall the difficulty with XOR:
- A single line cannot separate the 1's from the 0's in XOR.
- However, we could combine multiple lines:
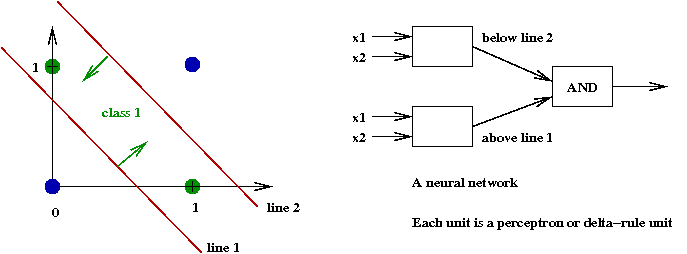
Exercise 25:
Determine weights for each of the three units above so that the
result achieves the XOR function. Then, build a truth table
and show how the combination results in computing XOR.
- By treating the earlier algorithms (perceptron, delta-rule)
as a single unit, we can build networks of such units:
- The hope is that we can learn more complex input-output
functions that can classify a given data set.
The two-layer backpropagation algorithm:
- We will now examine a simple, and popular two-layer algorithm
called backpropagation.
- There are two ideas at work here:
- Each unit will use sigmoids, allowing for differentiable
error functions.
- The error function will be the mean-square.
- We will use an approximate gradient descent to create an
iterative algorithm
\(\Rightarrow\) This algorithm will be applied to the training set samples.
- The network structure has two layers:
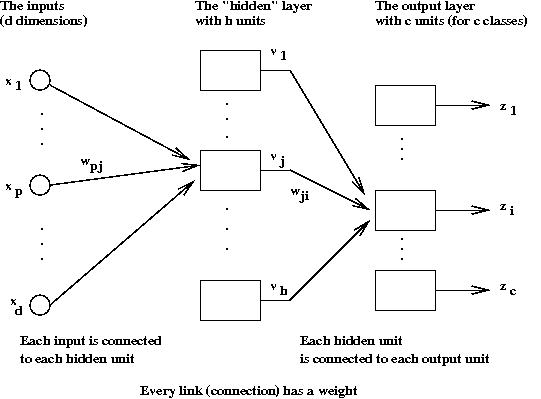
- The first layer is the so-called hidden layer.
- Each input \(x_i\) is fed into each hidden unit.
\(\Rightarrow\) Each hidden unit must have \(d+1\) weights.
- Let \(v_j\) denote the
output value of the \(j\)-th hidden unit.
(Here, \((j=1, ...,h)\).)
- The output of each hidden unit is connected to each of the
\(c\) output units.
\(\Rightarrow\) Each output unit must have \(h+1\) weights.
- Thus, it's natural to associate the weights with the connections.
- The \(j\)-th hidden unit computes
$$
v_j \eql f(\sum_p w_{pj} x_p)
$$
where \(f\) is the sigmoid function.
- Similarly, the \(i\)-th output unit computes
$$
z_i \eql f(\sum_j w_{ji} v_j)
$$
because the \(v_j\)'s are the inputs to those units.
- Next, let us understand how the network is applied to a
particular test sample:
Algorithm: applyBackPropagation (x)
Input: a sample x
// Compute the outputs of the hidden units
1. for each hidden unit j
2. Sj = w1jx1 + ... + wdjxd + wd+1,j
3. vj = f(Sj)
4. endfor
// Now compute the outputs of the output units
5. for each output unit i
6. Si = w1iv1 + ... + whivh + wh+1,i
7. zi = f(Si)
8. endfor
9. Find the largest zi among z1, ..., zc
// Classify into class i.
10. return i
For the training part, we will apply the gradient descent principle:
- Define \(z^{(m)}\) as the final output for the
\(m\)-th training sample.
- Define the error
$$
E \eql \frac{1}{2} \sum_m (y^{(m)} - z^{(m)})^2
$$
- First, we will compute partial derivatives with respect
to the weights in the output layer:
$$\eqb{
\frac{\partial E}{\partial w_{ji}}
\eqt
- (y_i - z_i) \frac{\partial z_i}{\partial w_{ji}} \\
\eqt
- (y_i - z_i) \frac{\partial f(S_i)}{\partial S_i}
\frac{\partial S_i}{\partial w_{ji}} \\
\eqt
- (y_i - z_i) f(S_i)(1 - f(S_i))
\frac{\partial S_i}{\partial w_{ji}} \\
\eqt
- (y_i - z_i) f(S_i)(1 - f(S_i)) v_j
}$$
- Thus, the update rule for these weights will be
$$
w_{ji} \eql w_{ji} + \alpha (y_i - z_i) f(S_i) (1 - f(S_i)) v_j
$$
where \(y_i\) = i-th component of \(y^{(m)}\)
and \(z_i\) = i-th component of \(z^{(m)}\).
- For the hidden layer units, there's an additional step
because the output \(z_i\) depends on all
the hidden layer weights.
- First, apply the chain rule:
$$
\frac{\partial E}{\partial w_{pj}}
\eql
\frac{\partial E}{\partial v_j}
\frac{\partial f}{\partial S_j}
\frac{\partial S_j}{\partial w_{pj}}
$$
- Then, observe that
$$
\frac{\partial f}{\partial S_j}
\eql
f(S_j) (1 - f(S_j))
$$
and
$$
\frac{\partial S_j}{\partial w_{pj}}
\eql x_j
$$
- Lastly,
$$\eqb{
\frac{\partial E}{\partial v_j}
\eqt
- \sum_i (y_i - z_i) \frac{\partial z_i}{\partial v_j}\\
\eqt
- \sum_i (y_i - z_i) \frac{\partial f(S_i)}{\partial S_i}
\frac{\partial S_i}{\partial v_j} \\
\eqt
- \sum_i (y_i - z_i) f(S_i) (1 - f(S_i)) w_{ji}
}$$
- Putting these together, we get
$$
\frac{\partial E}{\partial w_{pj}}
\eql
- x_j f(S_j) (1 - f(S_j))
\sum_i (y_i - z_i) f(S_i) (1 - f(S_i)) w_{ji}
$$
- Thus, the update rule for the hidden layer is:
$$\eqb{
w_{pj} \eqt w_{pj} + \alpha \frac{\partial E}{\partial w_{pj}}\\
\eqt
w_{pj} + \alpha x_j f(S_j) (1 - f(S_j))
\sum_i (y_i - z_i) f(S_i) (1 - f(S_i)) w_{ji}
}$$
Note: we've absorbed the minus sign into the constant
\(\alpha\).
- Whew!
- Finally, the training algorithm can be written as:
Algorithm: backpropagationTraining (x(m), y(m))
Input: M training samples x(m), y(m)
1. Initialize weights wji's and wpj's
2. while not converged
3. for each m
4. z(m) = applyBackpropagation (x(m))
// Change the weights of the hidden layer:
5. for each wpj
6. wpj = wpj + α xj f(Sj)(1 - f(Sj)) Σi (yi - zi) f(Si) (1 - f(Si)) wji.
7. endfor
// Change the weights of the output layer:
8. for each wji
9. wji = wji + α (yi - zi) f(Si) (1 - f(Si)) vj
10. endfor
11. endfor
12. endwhile
11.8 Feature extraction
Consider the following simple example:
- Suppose we have the following data (\(d=10\)) for two classes:
class 0:
m=1: 1 0 1 1 1 0 1 0 0 0
m=2: 0 0 1 0 1 1 0 0 0 1
m=3: 1 0 1 1 1 1 0 1 0 0
class 1:
m=1: 0 0 0 1 0 0 1 1 1 1
m=2: 0 0 0 1 0 0 1 1 1 1
m=3: 1 0 0 0 1 1 0 1 0 1
- Here, each \(x_i^{(m)}\) happens to be binary.
- Notice that \(d=10\).
- Next, observe \(x_3\) in the data:
class 0:
m=1: 1 0 1 1 1 0 1 0 0 0
m=2: 0 0 1 0 1 1 0 0 0 1
m=3: 1 0 1 1 1 1 0 1 0 0
class 1:
m=1: 0 0 0 1 0 0 1 1 1 1
m=2: 0 0 0 1 0 0 1 1 1 1
m=3: 1 0 0 0 1 1 0 1 0 1
\(\Rightarrow\) Obviously, \(x_3\) alone differentiates
the two classes.
- Thus one aspect of feature extraction is to extract
key elements of the data to help a classification algorithm.
\(\Rightarrow\) This is done prior to training.
- Consider this example:
class 0:
m=1: 1 0 1 1 1 0 1 0 0 0
m=2: 0 1 1 0 1 1 0 0 0 1
m=3: 1 0 1 1 1 1 0 1 0 0
class 1:
m=1: 0 0 0 1 0 0 1 1 1 1
m=2: 0 0 0 1 0 0 1 1 1 1
m=3: 1 0 1 0 1 1 1 1 0 1
- In this case, no single column distinguishes the two classes.
- However, suppose we count the number of 1's in each half of
each sample, e.g.,
1 0 1 1 1 0 1 0 0 0 // First half has 4 one's.
1 0 1 1 1 0 1 0 0 0 // Second half has 1 one.
This gives us two numbers (4,1) for each sample.
- Let's do this for each sample:
class 0:
m=1: 1 0 1 1 1 0 1 0 0 0 → (4, 1)
m=2: 0 1 1 0 1 1 0 0 0 1 → (3, 2)
m=3: 1 0 1 1 1 1 0 1 0 0 → (4, 2)
class 1:
m=1: 0 0 0 1 0 0 1 1 1 1 → (1, 4)
m=2: 0 0 0 1 0 0 1 1 1 1 → (1, 4)
m=3: 1 0 1 0 1 1 1 1 0 1 → (3, 4)
- Thus, class 0 samples have more 1's in the first half than in
the second.
\(\Rightarrow\) The opposite is true for class 1.
- Thus, the training samples given to the algorithm could
simply be:
class 0:
m=1: (4, 1)
m=2: (3, 2)
m=3: (4, 2)
class 1:
m=1: (1, 4)
m=2: (1, 4)
m=3: (3, 4)
- Note: the same feature extraction that is applied to
training samples must be applied to test samples:
- Suppose we want to classify
0 0 1 0 0 0 1 0 1 1
- We'd convert this to (1,3)
0 0 1 0 0 0 1 0 1 1 → (1, 3)
- Here, the dimension of the reduced sample is \(d=2\).
- This second example is perhaps more important:
- For large dimensions, it helps to look at the distribution
of values in a single sample.
- These distributions can become the features that
are fed as training samples to an algorithm.
Exercise 26:
Consider the point problem from earlier. Can any dimensions
be ignored for this problem?
Let's consider some ideas for the char problem:
- Recall: a single char is a collection of (tiny) line segments.
- The first idea is to examine the distribution of these segments
in 2D space:
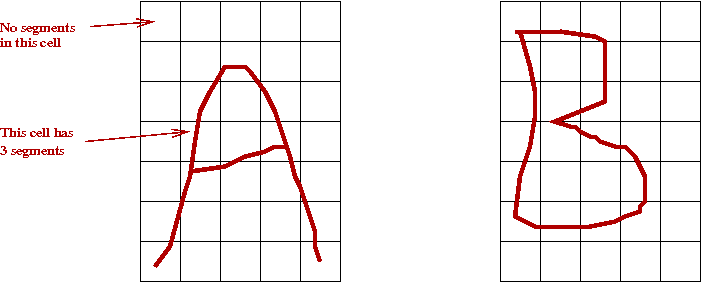
- We lay a fixed-size (M x N) grid over each char.
- For each cell, count the number of segments that intersect
with that cell.
\(\Rightarrow\) This will give us a training sample of size \(MN\).
- For example (for "A" above):
0 0 0 0 0 // M=7 rows, N=5 columns
0 1 2 0 0
0 2 1 3 0
0 3 2 4 0
0 4 1 2 0
2 1 0 0 2
2 0 0 0 2
- When converted into a training sample of dimension \(d = M x N\) = 35.
0 0 0 0 0 0 1 2 0 0 0 2 1 3 0 0 3 2 4 0 0 4 1 2 0 2 1 0 0 2 2 0 0 0 2
(We have inserted spaces for readability).
- The second idea: examine the distribution of segment angles:
- Suppose we have an "A" with 5 segments:
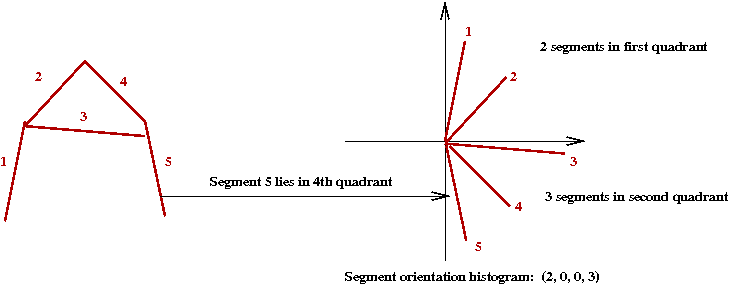
- Similarly, for a "B" with 7 segments:
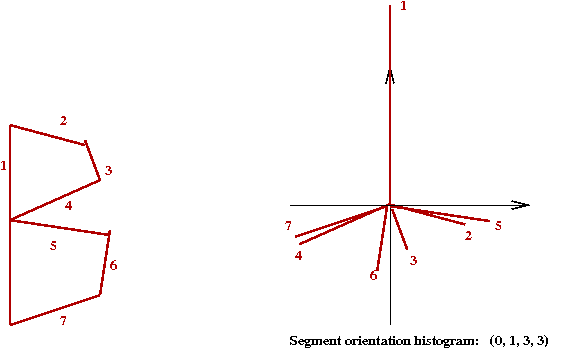
- Two other refinements to this second idea:
- Notice that the (angle) histogram has 4 bins
\(\Rightarrow\) In practice, a larger number (10) is probably more useful.
- Because the actual orientation of the char may vary
\(\Rightarrow\) It helps to order the histogram by starting with the
largest bin.
- We have only scratched the surface of feature extraction for
handwritten text
\(\Rightarrow\) For full text, and placement within a page, there are far
more issues that must be considered.
For example, see this
project about address recognition from postal envelopes.
What about our third problem - face recognition?
- Clearly, feature extraction is highly domain-specific
\(\Rightarrow\) Detailed knowledge of the application and the data type is useful.
- What kinds of information can we extract from images?
\(\Rightarrow\) Obvious properties include: intensity, color, size.
- But do these properties really help?
\(\Rightarrow\) Sometimes a histogram of intensities or color can
make a difference.
- We will, however, consider a different approach - one that
is similar to the segment-orientation idea for chars.
- Step 1: convert to greyscale.
- Next, recall that a greyscale image is just a 2D array of intensities.
- Step 2: define a collection of (possibly overlapping) blocks
to cover the image:
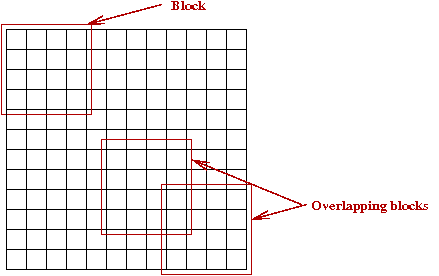
- Step 3: For each block, compute a histogram of gradient orientations:
- You are thinking ... where are the gradients in an image?
- We will compute a gradient orientation at each pixel (in a block).
\(\Rightarrow\) The histogram is merely the histogram of these values.
- So what is the gradient orientation at a pixel? Let
\(A[i,j]\) denote the pixel at row \(i\), column \(j\).
- First, compute the average change in \(x\) and \(y\) directions
separately:
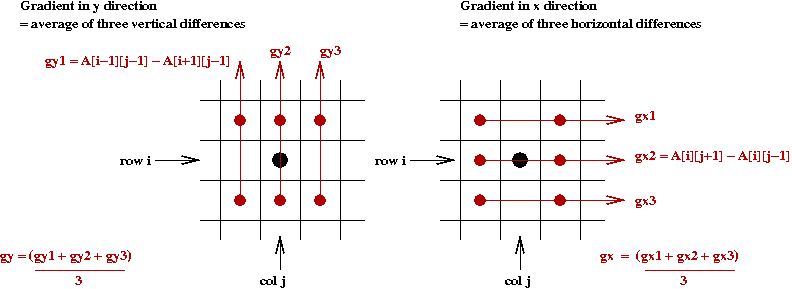
- Then consider the values \((g_x, g_y)\).
\(\Rightarrow\) The orientation (angle) is
\(a_{i,j} = \tan^{-1} (g_y / g_x)\)
- A histogram of \(a_{i,j}\) values is computed for
each block (using some bin size).
- These histograms are then concatenated together into a large vector
\(\Rightarrow\) This vector becomes the training sample.
- Additional detail about this technique can be found in
this Wikipedia article.
Exercise 27:
Examine the file FaceFeatures.java in the
classifierJar directory to confirm that this method
is implemented by the class FaceFeatures2.
Switch to using this class, and try to classify test images
using NearestNeighbor.
11.9 Summary
What have we learned in machine learning?
- We've seen that feature extraction and learning can
be separated:
- Feature extraction is domain-specific.
\(\Rightarrow\) One needs to custom-design a feature extractor for each
type of problem.
- The learning algorithms can be quite general.
- We focused in particular on the classification problem.
- The key ideas came from applying probability and optimization
\(\Rightarrow\) In particular, conditional distributions and gradient descent.
What else is there to learn in machine learning?
- We have only scratched the surface (a few textbook chapters)
of machine learning.
- There are various specialty areas with algorithms:
- Support vector machines.
- Logistic regression.
- Decision trees.
- Inductive learning.
- Techniques for improving the training process:
- Boosting (how to make any algorithm better).
- Careful pre-processing of samples to pick more
representative ones, and remove outliers.
- There are also a variety of problem types:
- Unsupervised learning (when labels are not known).
- Temporal learning (learning over a sequence of steps).
- State-based learning (hidden markov models).
- The deep and growing connection with statistics:
- We've seen that classification is really a type of prediction.
- In statistics, the problem is often called regression.
- The applications are many and growing. Examples of successful ones:
- Speech, face, handwriting recognition.
- Gene finding (bioinformatics).
- Bio-sample classification.
- Natural language parsing.
- Text understanding.
- Security (biometrics).
© 2008, Rahul Simha