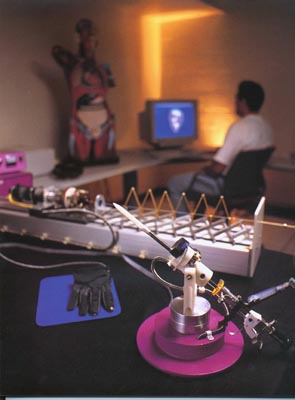
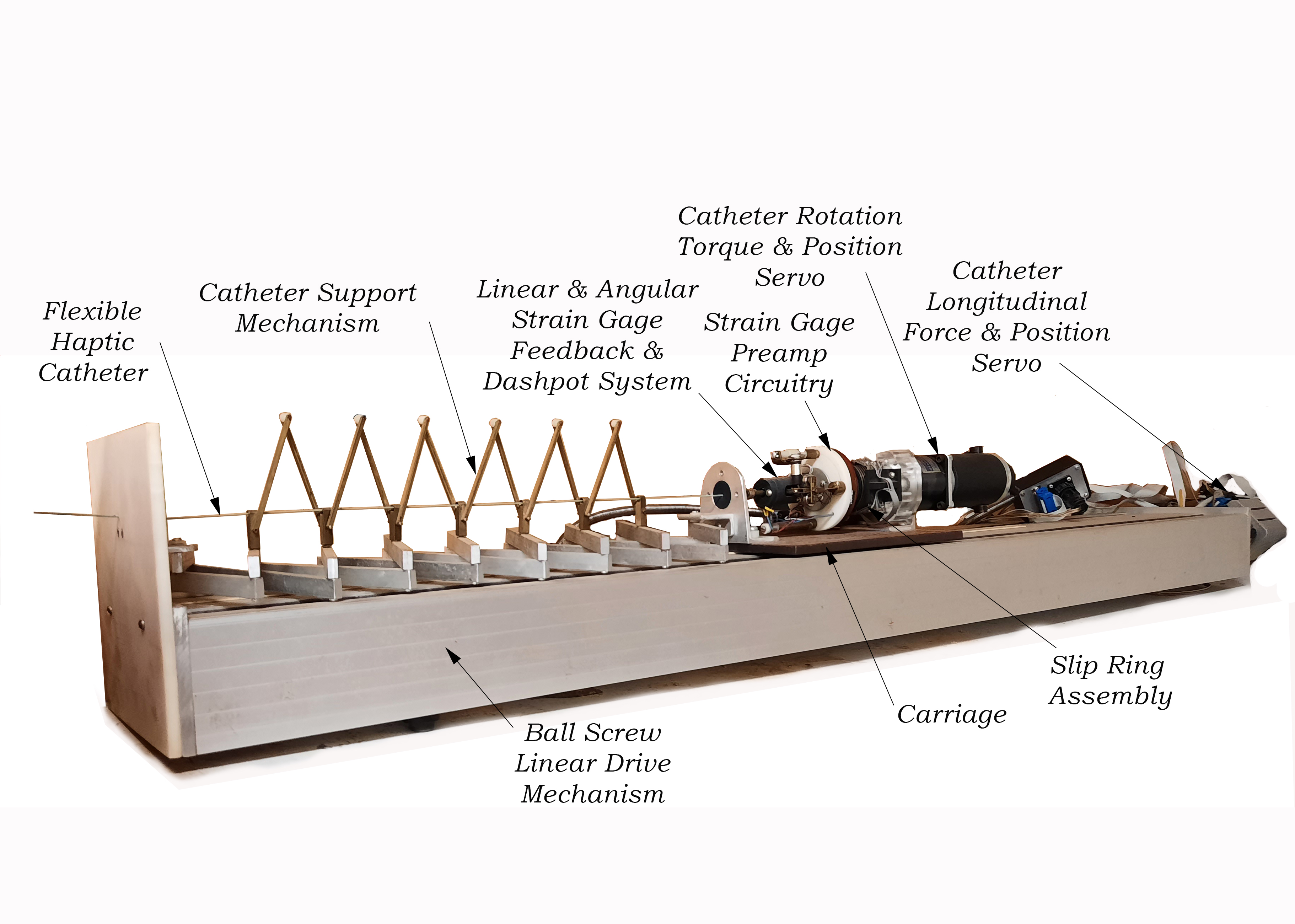
The device with the purple circular base and the stainless steel surgical instruments is for training urologists. The long device with the white base is a haptic catheter device for training interventional radiologists in vena cava filter placement. An active control system transmits position and force data to the computer via the interface electronics in the case on the left and the device replicates the feel and response of an actual catheter based on the results of the real-time simulation.
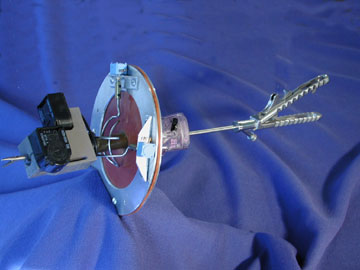
Other devices are being designed to train urologists in performing
cryosurgery. With the simulator, urologists could practice a procedure
by varying the entry angle of the cryoprobe in the pitch and yaw
directions and also moving the probe in and out. Simulated tissue
resistance is felt by the user via a computer-controlled braking
device coupled to the simulation. The simulator also incorporates
a four degree-of-freedom non-haptic ultrasound probe simulator.
This next device is a prototype virtual reality interface I made for training surgeons in performing laproscopic and endoscopic procedures.

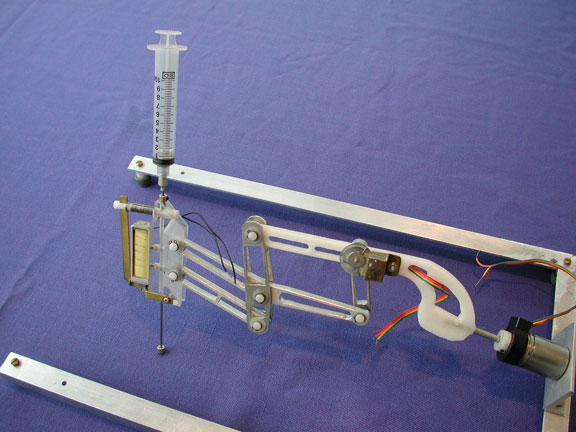
The device below is a prototype virtual reality interface device I made for training medical personnel in performing needle sticks.
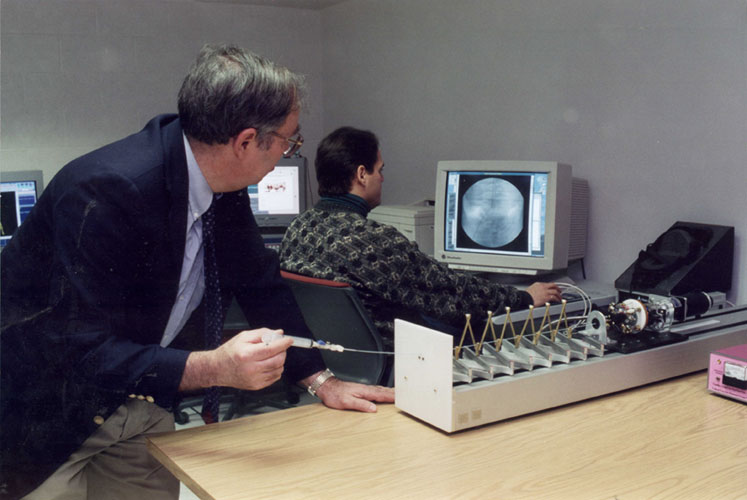
Further details of the Kaufman Haptic Catheter Simulator System for training interventional radiologists and surgeons in feeding catheters from an incision near the groin either to the brain to treat aneurysms or else to insert filters in the vena cava:
The doctor can push, pull, and twist on the end of the flexible catheter while watching the computer simulation of what they would see on their actual fluoroscopic display. The forces and torques applied by the doctor are transmitted to the computer which displays what would be seen under those conditions in an actual patient. The computer in turn directs the servo system to translate or rotate the catheter as it would behave in an actual patient and to provide the haptic forces and torques that would be felt if the catheter were touching or moving through actual blood vessels or being manipulated to navigate past branches in arteries.
(I designed and built the electromechanical components seen here but the computer simulation work was done by Robert Lindeman and others within LACAM.)

The prototype Kaufman haptic interface for lower urinary tract endoscopic simulation allowed four degrees of freedom and provided a haptic experience to simulate tissue resistance:
